Un equipo de investigación de la Universidad de West Virginia en los Estados Unidos desarrolló recientemente una mano robótica suave pero poderosa que no solo puede recoger suavemente frutas y verduras frágiles como las fresas, sino que también juzga de manera integral la madurez a través del tacto y la visión durante el proceso de recolección, lo que se espera que reduzca significativamente los costos de mano de obra y las tasas de desperdicio en el proceso de recolección.
Según los informes, la agricultura se está convirtiendo en una de las industrias cada vez más afectadas por la tecnología robótica. Los agricultores de muchas regiones del mundo se enfrentan a la doble presión de la escasez de mano de obra y el aumento de los costos laborales. En algunos cultivos, los costos de recolección manual son incluso cercanos a la mitad de los costos totales de producción. Para frutas y verduras con períodos de recolección extremadamente cortos y fáciles de magullar, como fresas, frambuesas y aguacates, a menudo es difícil equilibrar la eficiencia y las pérdidas con la recolección manual tradicional o mecánica rígida. Como resultado, los agricultores pueden perder hasta una cuarta parte de su rendimiento.
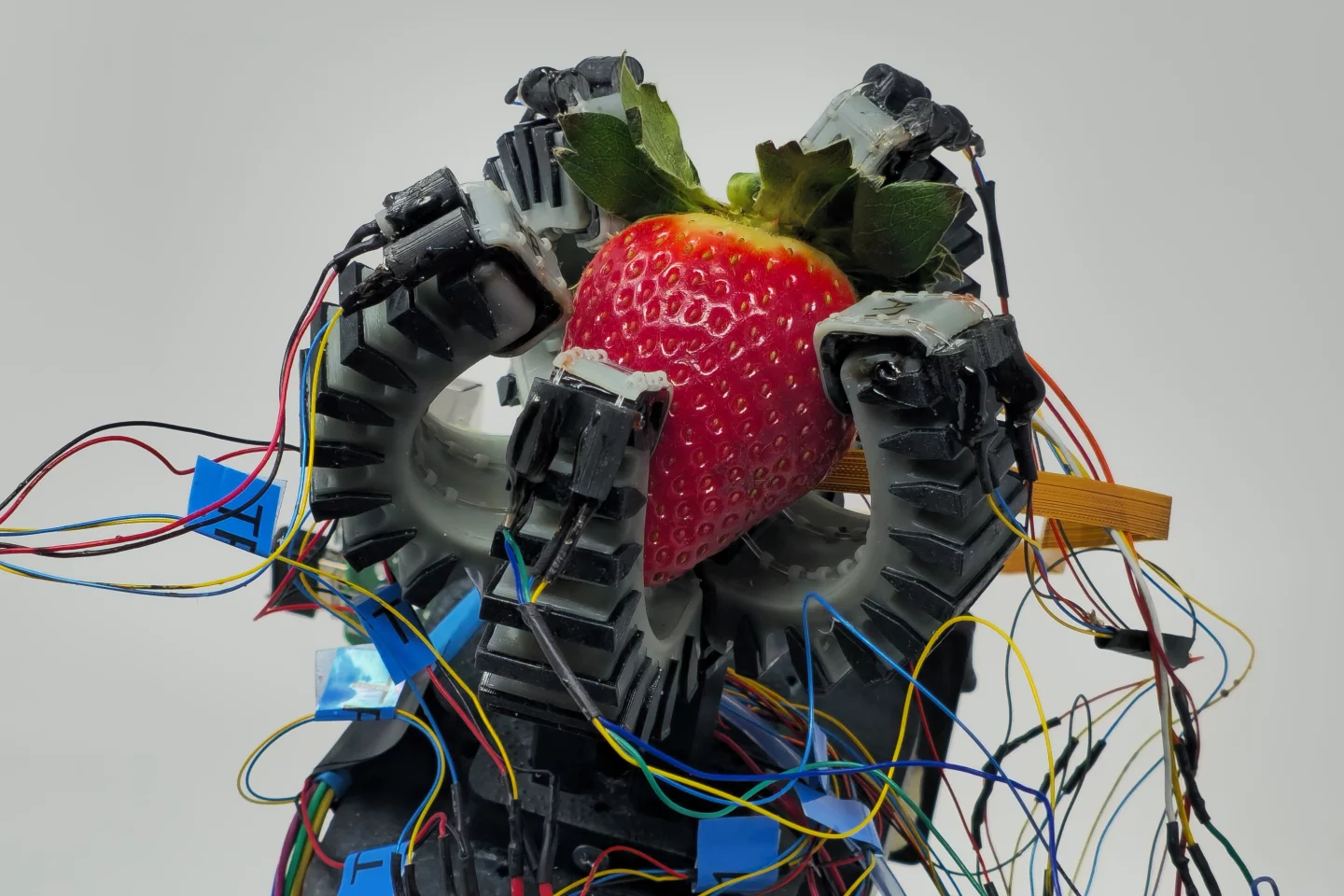
El equipo del "Robiotics Lab" de la Universidad de West Virginia ha estado trabajando en el desarrollo de robots que imiten el movimiento de los animales. La suave mano robótica lanzada esta vez no es la "garra mecánica" de metal en la que la gente piensa. En cambio, se inspira en la anatomía de las estrellas de mar y utiliza materiales de silicona y poliuretano para hacer dedos suaves. Al mismo tiempo, la forma general mantiene una disposición de cinco dedos similar a la de una mano humana, de modo que pueda recoger y sostener frutas de forma más natural.
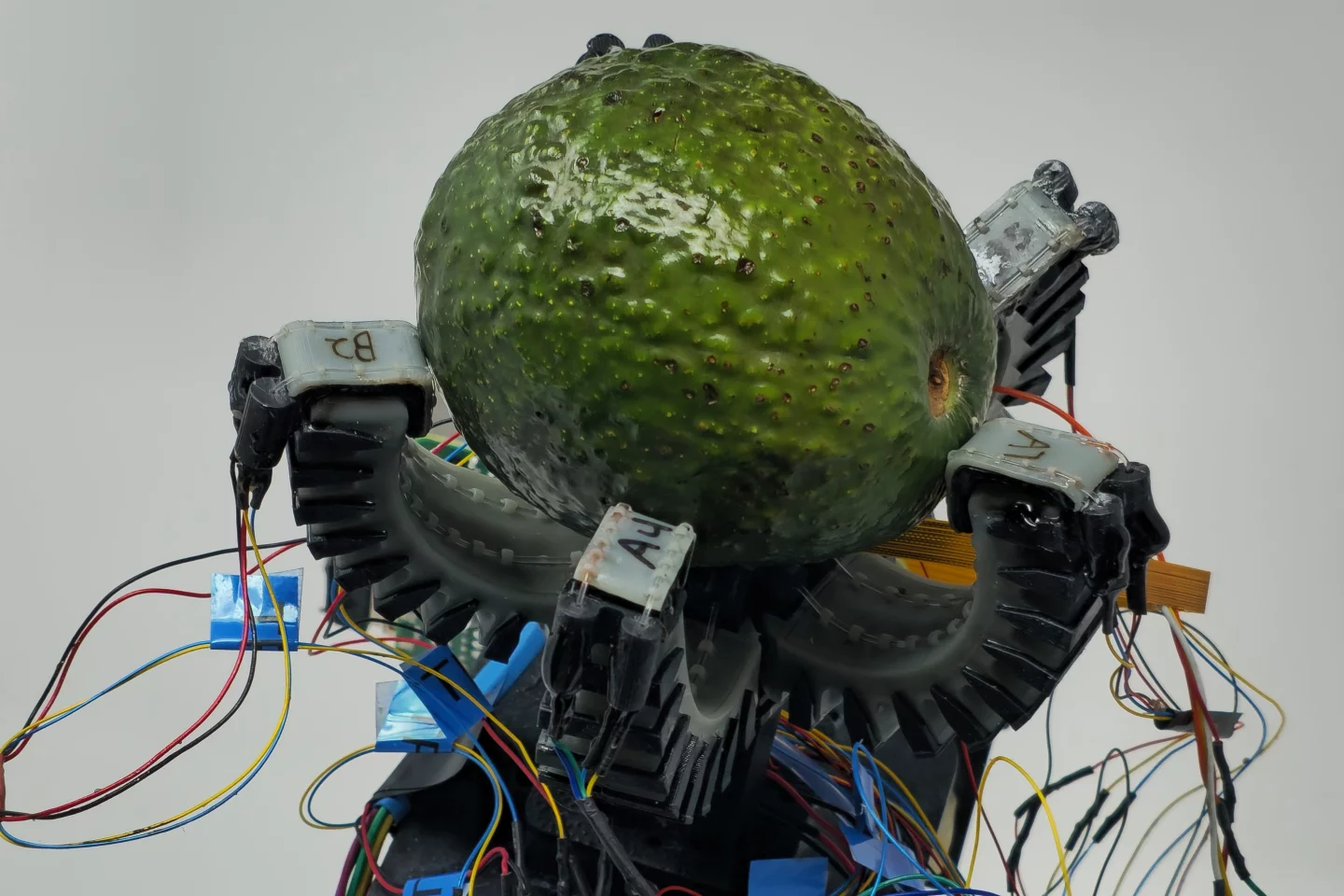
En términos de capacidades de percepción, esta nueva mano robótica está equipada con una cámara en miniatura para juzgar visualmente el aspecto de las frutas. Esta función se ha aplicado a algunos robots agrícolas. Sin embargo, los investigadores señalaron que basarse únicamente en la apariencia no es suficiente para juzgar con precisión la madurez. Tomando como ejemplo los aguacates, a menudo es necesario detectar su madurez pellizcandolos suavemente. Cómo permitir que el robot aprenda este juicio "intuitivo humano" es una de las dificultades clave de esta investigación.
Para resolver este problema, el equipo de investigación incorporó sensores táctiles especiales dentro de los dedos blandos, de modo que cuando el robot aprieta suavemente la fruta, pueda obtener información física sobre la dureza y elasticidad sin aplastar la fruta. Estos sensores también pueden controlar la fuerza de sujeción en tiempo real. Cuando el sistema determina que el agarre actual no es lo suficientemente firme, el robot ajustará automáticamente la fuerza para evitar que la fruta se resbale o caiga al suelo.
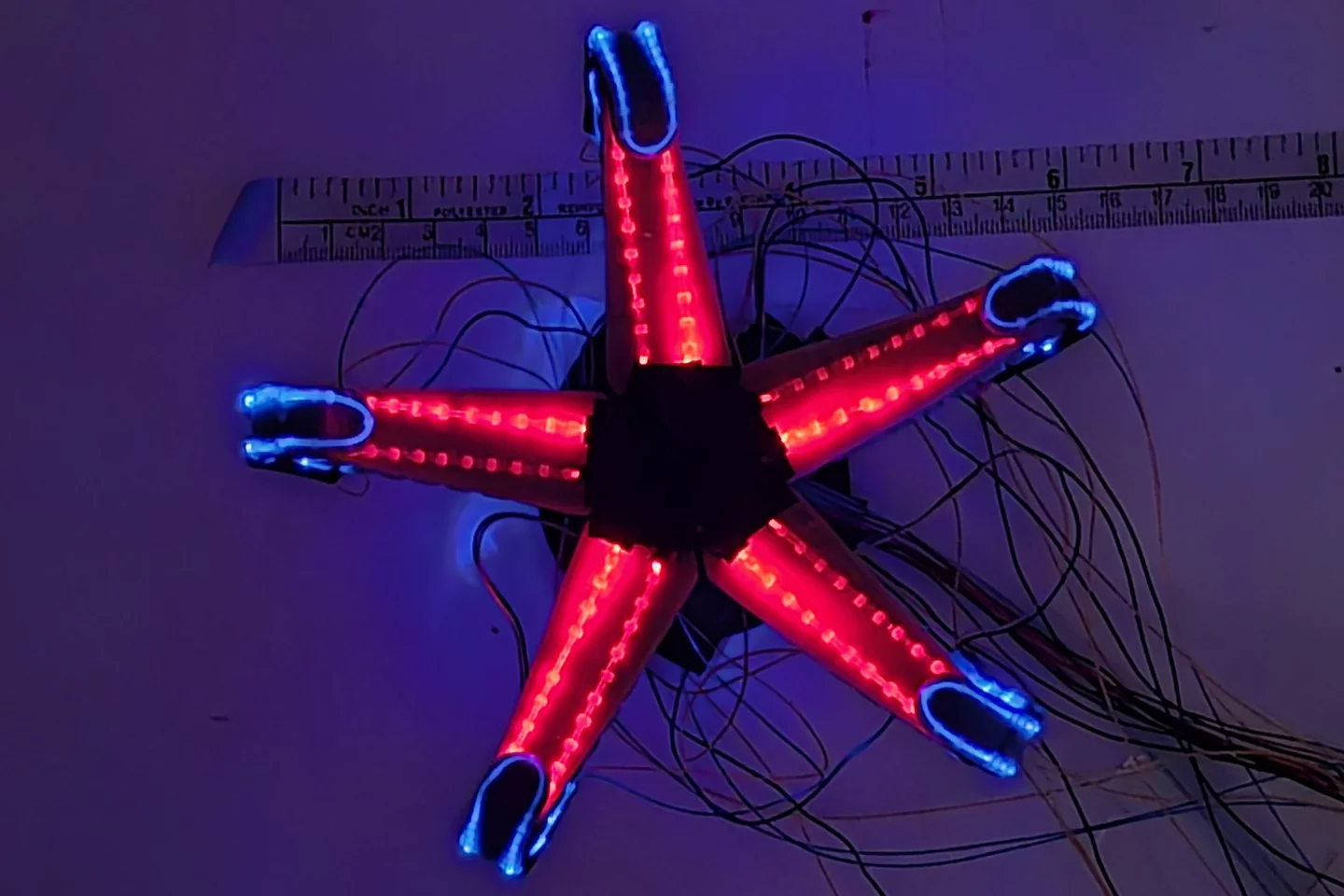
Durante la fase de prueba, la mano del robot demostró una alta percepción y precisión de control, y el sensor pudo predecir la forma de la fruta agarrada con casi un 100% de precisión. El prototipo actual del dispositivo pesa menos de 65 gramos, tarda menos de dos segundos en abrirse y cerrarse una vez y puede levantar un objeto máximo de aproximadamente 1 kilogramo, lo que proporciona las condiciones básicas de ligereza y velocidad de respuesta para la integración real de maquinaria agrícola.
El líder del proyecto, Anand Mishra, profesor asistente en el Departamento de Ingeniería Mecánica, Materiales e Ingeniería Aeroespacial, dijo que el equipo planea llevar esta tecnología de agarre de software al mercado global en los próximos dos a cuatro años, y está trabajando en el desarrollo de un dispositivo de agarre más escalable para satisfacer las necesidades de implementación a gran escala en el campo. Los investigadores también son optimistas sobre las perspectivas de aplicación de esta tecnología en una gama más amplia de escenarios, incluida la captura de objetos extraños en misiones espaciales, la exploración del entorno submarino y el funcionamiento seguro de tejidos y órganos frágiles en el campo de la atención médica.

Se han publicado artículos de investigación relevantes en la revista "Nature Communications", que muestran que las soluciones de agarre de robots que combinan estructuras de software, sistemas de visión y detección de fibra óptica se están convirtiendo en un camino técnico importante para escenarios de alta precisión y altas pérdidas. Los investigadores señalaron que a medida que estos robots blandos avancen gradualmente hacia la comercialización, se espera que mejore significativamente la proporción de presión humana y desperdicio de frutas y verduras en la primera línea de recolección agrícola, proporcionando una nueva base de herramientas para el desarrollo de la agricultura de precisión y la maquinaria agrícola inteligente.