Un equipo de investigación de la Universidad de Würzburg en Alemania desarrolló recientemente un nanorobot impulsado por fotones, que tiene aproximadamente una quincuagésima parte del diámetro de un cabello humano. Puede rastrear, capturar, transportar y liberar bacterias con precisión en un entorno microscópico líquido, proporcionando una nueva vía tecnológica para que los humanos controlen directamente el mundo microbiano.
Los informes muestran que este tipo de microrobots están destinados a operaciones a microescala que son casi imposibles de intervenir eficazmente con medios tradicionales. Para materiales biológicos como células individuales y bacterias en un ambiente líquido, cómo lograr un control de alta precisión siempre ha sido un problema importante en la investigación científica, y este nuevo resultado muestra que tareas como recolectar y reubicar bacterias ahora son factibles.
El equipo de investigación estuvo dirigido por Bert Hecht, profesor de la Universidad Julius-Maximilians de Würzburg en Alemania. La solución principal propuesta por el equipo es utilizar el débil retroceso generado cuando se emite un solo fotón para impulsar el movimiento de un dispositivo a escala micrométrica llamado "microdron".
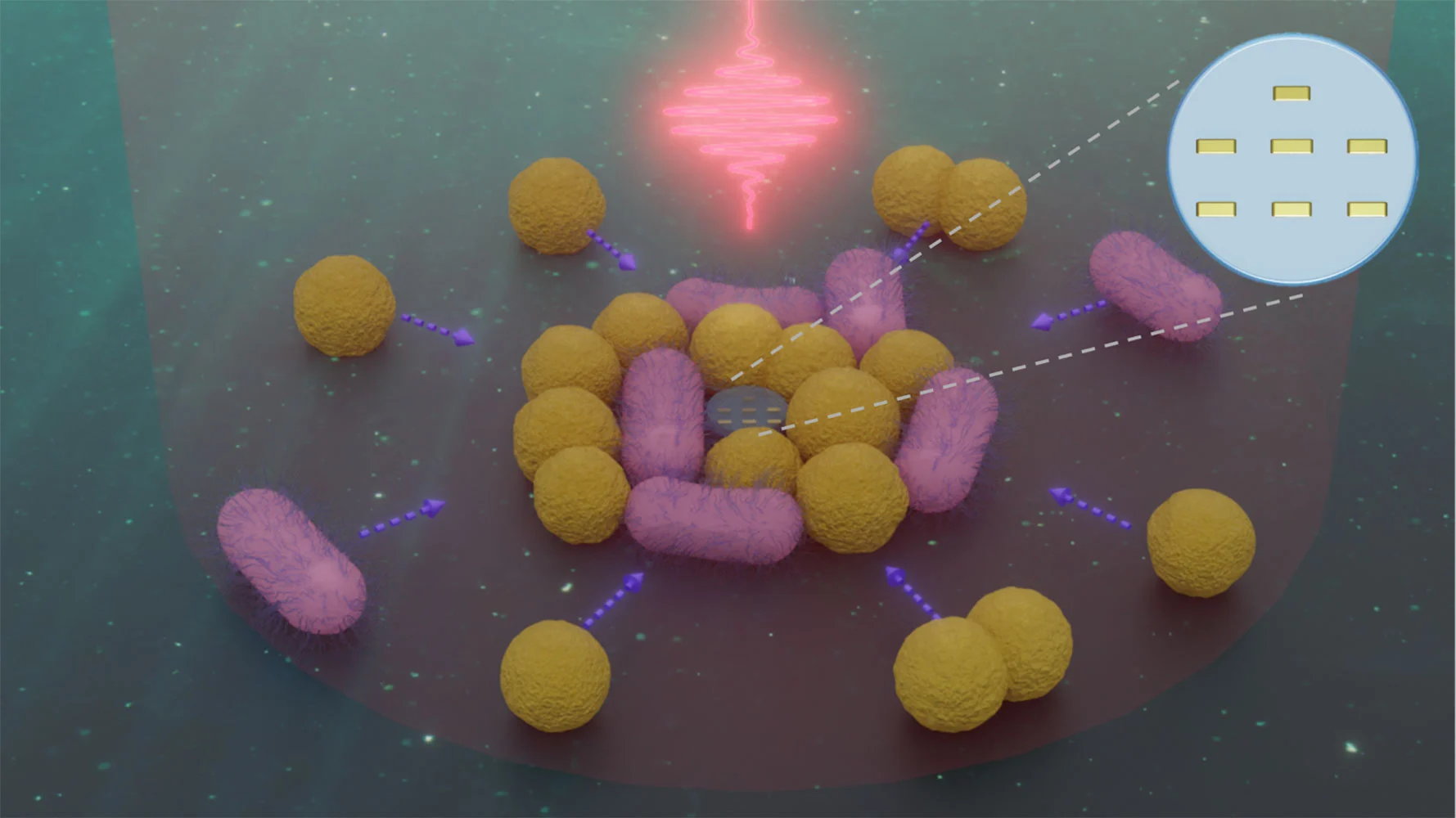
Según los informes, en el interior de estos dispositivos se pueden integrar hasta cuatro nanoantenas plasmónicas. Primero absorben luz con propiedades específicas y luego reemiten fotones de manera direccional; cada disparo producirá una fuerza de retroceso extremadamente pequeña, que es similar en principio a la fuerza de retroceso de una bala después de salir del cañón. Dado que la masa del microrobot en sí es extremadamente baja, incluso si esta fuerza es muy débil, sigue siendo suficiente para lograr una alta velocidad y una rápida aceleración.
En las últimas investigaciones, los investigadores han reducido aún más el tamaño de este tipo de robot impulsado por luz a menos de 1 micrón y han simplificado su método de control, pero aún conservan el mecanismo de propulsión basado en el retroceso de fotones.
El equipo aprovechó el hecho de que los cables de la antena dentro del robot se alinean naturalmente con la dirección de polarización de la luz incidente. Al ajustar el estado de polarización de la luz, los investigadores pueden controlar la dirección del robot, y su impulso hacia adelante aún proviene del retroceso de los fotones, lo que hace que su método de control se acerque más al modo de transporte macroscópico de "dirección más propulsión".
Jin Qin, el primer científico experimental en el artículo, dijo que, en esencia, lo que el equipo construyó es un nanorobot impulsado por luz, que puede bloquear y recolectar bacterias. Debido a la estructura simplificada, el tamaño del robot se ha reducido a una escala en la que puede participar directamente en las actividades microbianas, en cierto sentido, es como un "dispositivo de limpieza microscópico".
Los investigadores dijeron que este tipo de nanorobot tiene una alta maniobrabilidad y puede completar rápidamente giros de 90 grados, por lo que puede realizar escaneos sistemáticos y eficientes en un área de muestra grande. Al mismo tiempo, puede capturar, transportar y liberar selectivamente un número considerable de bacterias.
Esto significa que en un entorno experimental controlado, se espera que este tipo de dispositivo realice una operación de "limpieza" en el microambiente: recolecte bacterias de manera concentrada y transfiéralas a una ubicación predeterminada.
Bert Hecht señaló que este logro demuestra vívidamente que la luz no sólo puede usarse para observar el mundo microscópico, sino que también puede usarse para darle forma activamente. Aunque el concepto de "microrobots de limpieza" parezca futurista, los principios físicos pertinentes ya se han verificado experimentalmente.
Incluso cuando transportan grandes grupos de bacterias, los nanorobots conservan su movilidad total, aunque su velocidad de movimiento se reduce ligeramente. El equipo de investigación cree que esta estabilidad resalta aún más su potencial de aplicación en campos como la microbiología, la investigación biomédica y el control preciso a escala ultrapequeña.
El artículo de investigación relevante se titula "Un limpiador robótico a nanoescala", firmado conjuntamente por Jin Qin, Carsten Büchner, Wu Xiaofei y Bert Hecht, y se publicó el 27 de marzo de 2026.