En lugar de la laboriosa y lenta tarea de diseñar y construir pequeños robots desde cero, algunos científicos están transformando insectos existentes en robots controlados remotamente. Una nueva "línea de montaje" que pueda transformar cucarachas en robots mucho más rápido que a mano puede ayudar.
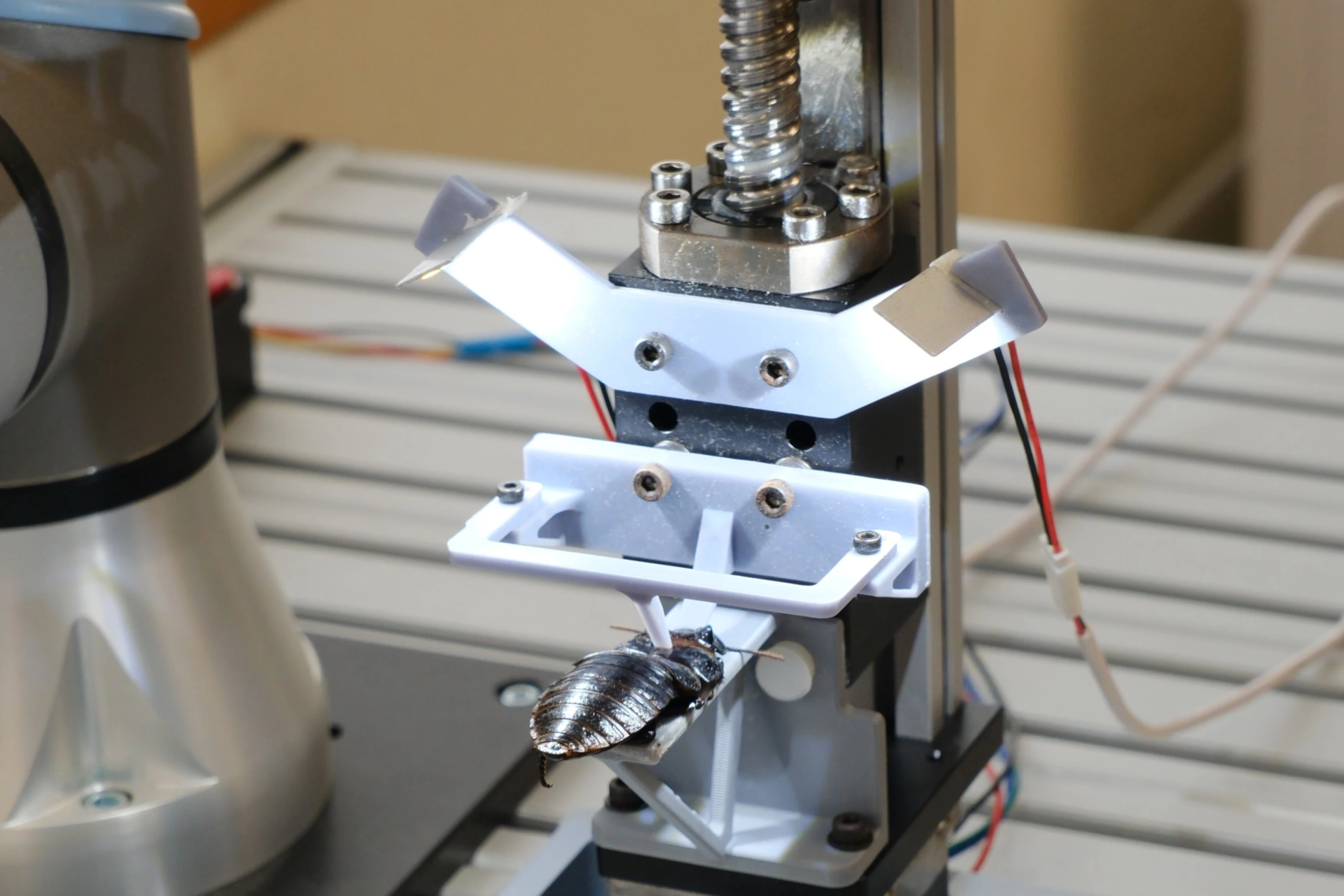
Una cucaracha anestesiada espera su mochila electrónica en una línea de montaje
En pocas palabras, un insecto robótico suele consistir en un insecto más grande (normalmente una cucaracha vocal de Madagascar) equipado con una pequeña mochila electrónica. Los electrodos controlados a distancia en la mochila estimulan partes del cuerpo del insecto, como sus antenas o sus ojos, para hacer que comience y deje de caminar, y gire hacia la izquierda o hacia la derecha.
Por supuesto, todo esto no nació simplemente de una curiosidad morbosa. Uno de los principales usos de estos robots es buscar supervivientes atrapados entre los escombros en los lugares de desastre. Equipado con una cámara controlada a distancia, el robot Cockroach puede abrirse paso a través de espacios que de otro modo serían infranqueables entre los escombros y transmitir imágenes en vivo y las coordenadas de los supervivientes que encuentre.
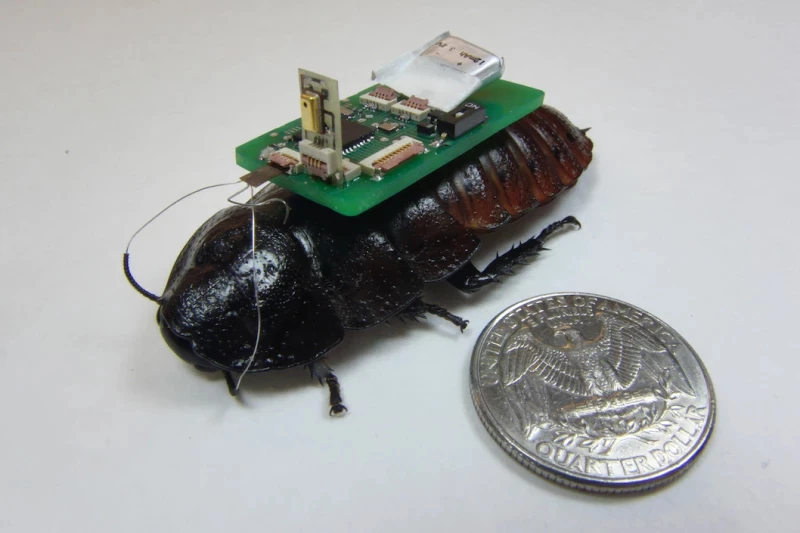
Cucaracha robot desarrollada por la Universidad Estatal de Carolina del Norte
Sin embargo, para una tarea de tan gran escala, unas pocas cucarachas robóticas no son suficientes.
Se prevé que enjambres de insectos se desplegarían en las ruinas, tal vez incluso coordinando sus rutas de búsqueda mediante comunicación inalámbrica entre mochilas. Por ejemplo, si los caminos de dos robots se superponen, sus mochilas pueden alejarlos uno del otro.
Para que esta tecnología sea factible, las cucarachas no pueden diseñarse cuidadosamente a mano... deben producirse rápidamente mediante procesos automatizados. Aquí es donde entra en juego la línea de montaje.
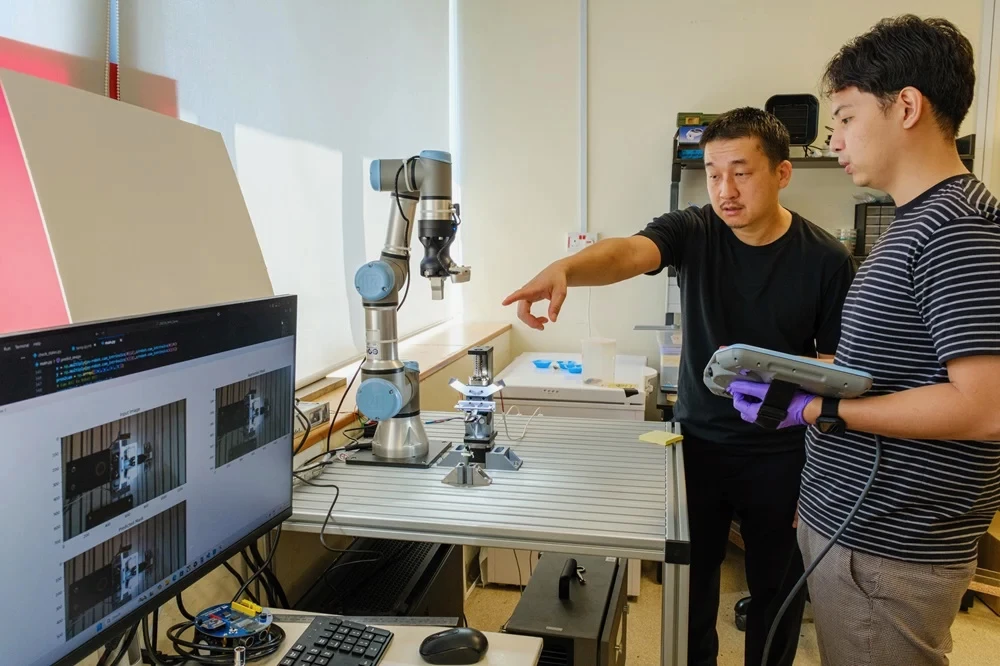
El desarrollo de la línea de montaje (en la foto) contó con el apoyo de la Agencia Japonesa de Ciencia y Tecnología.
Desarrollado por el profesor Hirotaka Sato y sus colegas de la Universidad Tecnológica de Nanyang en Singapur, el sistema controlado por computadora consta de una plataforma para sostener el insecto, una cámara de detección de profundidad Intel RealSense y un brazo robótico UR3e con una pinza robótica Hand-E.
Después de asegurar la cucaracha anestesiada a la plataforma, un motor desliza el dispositivo en su lugar y un sistema de visión por computadora evalúa el tamaño y la posición de la cucaracha. Luego se retira parte de la cutícula externa de la cucaracha, exponiendo una membrana entre su pronoto y los segmentos mesotorácicos.
A continuación, se colocó una mochila preensamblada de 2,3 gramos en el cuerpo de la cucaracha y se implantaron dos electrodos bipolares en la parte delantera de la mochila en los lados izquierdo y derecho expuestos del peritoneo de la cucaracha. Luego, presione suavemente la mochila principal contra la mitad del tórax de la cucaracha hasta que encaje en su lugar. Como paso final, deslice la plataforma hacia afuera para liberar la cucaracha aún anestesiada.
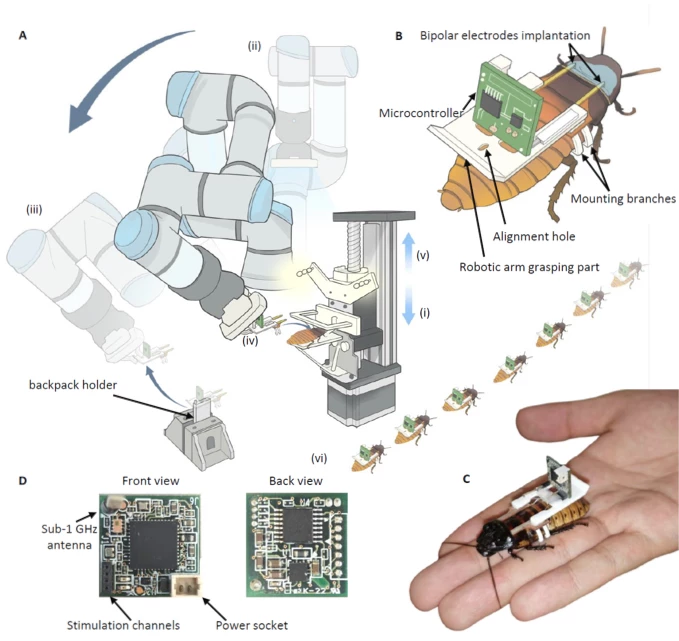
Esquema de una línea de montaje y una cucaracha robótica: se han probado robots ensamblados a mano en el campo después de que un terremoto de magnitud 7,7 sacudiera Myanmar
Todo el proceso tomó 68 segundos por cucaracha, mientras que la misma tarea tomaría entre 15 minutos y una hora a mano. En pruebas con cucarachas de línea de montaje y cucarachas robóticas ensambladas a mano, se descubrió que ambos grupos se desempeñaban de manera similar al realizar tareas controladas a distancia, como caminar por un camino en forma de S y explorar obstáculos.
Esta configuración robótica particular tiene el beneficio adicional de utilizar solo el 40% del tiempo de estimulación y el 75% del voltaje de estimulación de sistemas similares para los insectos (y baterías de mochila). Además, la mochila se puede quitar entre misiones.
"Nuestra innovación hace que el sueño de desplegar un gran número de insectos robóticos en escenarios de la vida real sea más realista", afirmó Sato. "Al automatizar el proceso, podemos producir rápida y continuamente robots híbridos de insectos. Esto nos permitirá producirlos a escala, lo cual es fundamental para operaciones en las que el tiempo es crítico, como la búsqueda y el rescate después de un desastre".
Recientemente se publicó un artículo sobre la investigación en la revista Nature Communications.