Incluso si se construye el microvehículo aéreo para insectos (MAV) más avanzado del mundo, en última instancia será de poca utilidad si no puede aterrizar de manera estable. Es por eso que los científicos de la Universidad de Harvard diseñaron su RoboBee con un par de patas largas parecidas a las de un mosquito, con articulaciones.
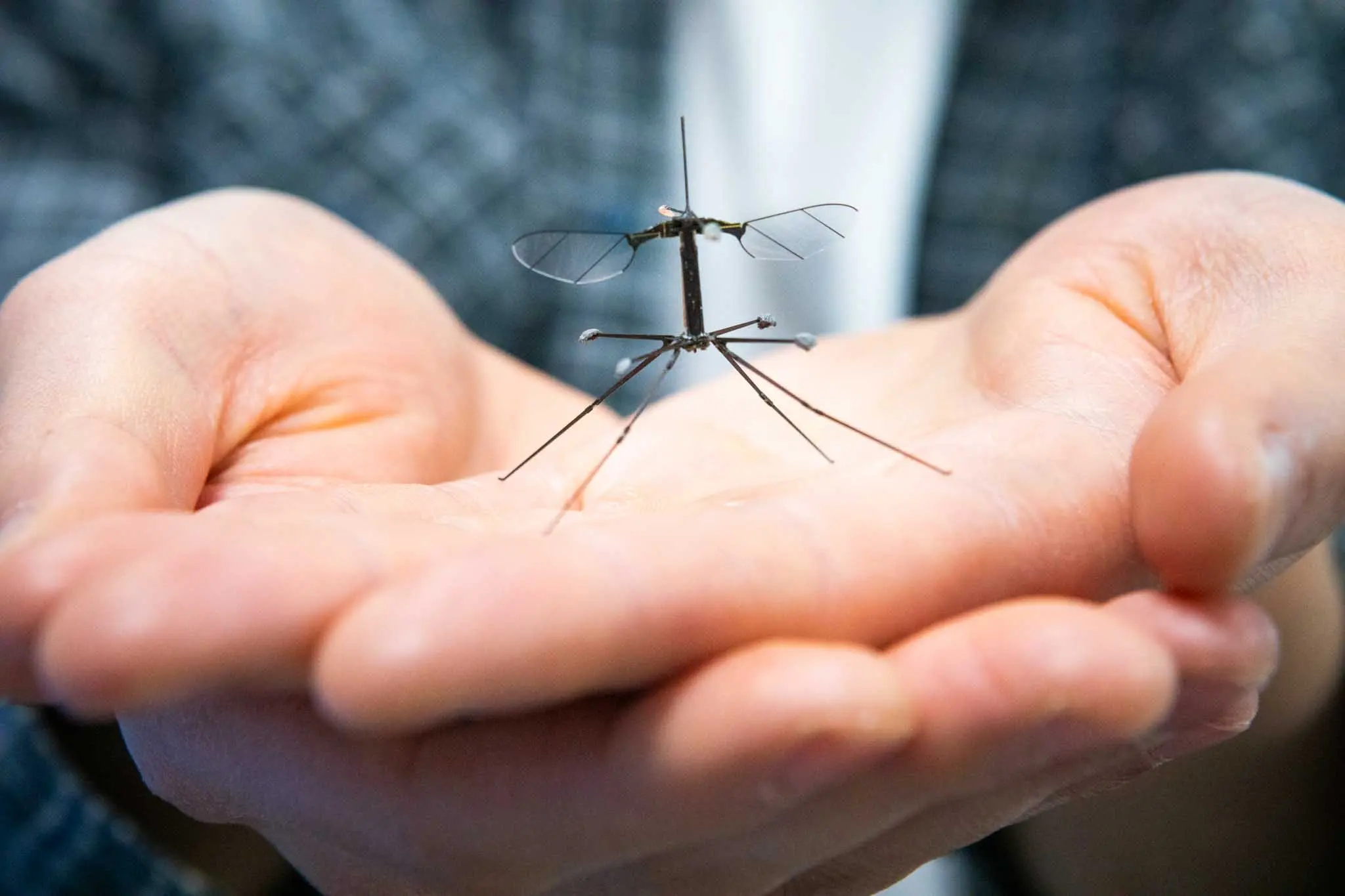
RoboBee tiene patas que imitan a los mosquitos; las versiones futuras podrían usarse en operaciones de búsqueda y rescate o para la polinización de cultivos.
Para aquellos que no están familiarizados con RoboBee, es un robot inspirado en las abejas que vuela batiendo un par de pequeñas alas equipadas con músculos artificiales. Tiene una envergadura de menos de 3 centímetros (1,2 pulgadas) y pesa sólo una décima de gramo... aunque está conectado a una fuente de alimentación y a un microprocesador mediante cables. Dicho esto, es posible que las versiones futuras se ejecuten de forma completamente independiente. De hecho, ya existe una versión solar.
Si bien otras versiones de este pequeño robot han demostrado ser capaces de realizar maniobras como vuelo bajo el agua y paradas colgantes, el modelo base nunca ha funcionado bien al aterrizar en superficies planas (u otras). Esto se debe a que los vórtices creados por el aleteo de sus alas pueden provocar turbulencias en el aire cuando están restringidos por el suelo, lo que hace que el robot pierda el equilibrio.
"Anteriormente, si estábamos aterrizando, apagábamos el vehículo un poco más lejos del suelo, lo dejábamos caer y rezábamos para que aterrizara en posición vertical y segura", dijo Christian Chan, un estudiante graduado en ingeniería que lidera el rediseño mecánico del robot.

Los mosquitos son conocidos por su capacidad de aterrizar suavemente.
Las cuatro nuevas patas de RoboBee, inspiradas en las patas de los mosquitos, son lo suficientemente largas y flexibles como para poder hacer contacto con el suelo de forma segura antes de que el cuerpo del robot se vea afectado por la turbulencia del efecto suelo.
Además, los nuevos algoritmos de control ayudan a guiar al robot para que aterrice más suavemente, en lugar de dejarlo "simplemente caer".

Exposición múltiple de RoboBee despegando de una hoja y aterrizando en otra usando sus nuevas patas
"Encontrar inspiración biológica entre la amplia variedad de insectos nos proporciona innumerables formas de seguir mejorando los robots", dijo Alyssa Hernández, investigadora postdoctoral y coautora del artículo de investigación. "A su vez, podemos utilizar estas plataformas robóticas como herramientas para la investigación biológica, realizando estudios que prueben hipótesis biomecánicas".
El artículo fue publicado recientemente en la revista Science Robotics. En el vídeo a continuación, puedes ver al RoboBee imitar el movimiento de aterrizaje de una mosca grúa.
Fuente: Escuela de Ingeniería y Ciencias Aplicadas John A. Paulson de Harvard