Un equipo de investigación del Laboratorio de Sistemas y Algoritmos de Aprendizaje (LASA) de la Escuela de Ingeniería de EPFL, Suiza, propuso recientemente un nuevo método de aprendizaje de "inteligencia cinemática" que permite a robots con diferentes estructuras dominar las mismas tareas a través del mismo conjunto de algoritmos de aprendizaje sin la necesidad de reescribir o personalizar el código de control para cada tipo de robot. Se espera que este logro reduzca significativamente el tiempo y el costo de implementar nuevas habilidades robóticas en escenarios de investigación industrial y científica.
En el mundo humano, hemos estado aprendiendo nuevas habilidades observando, imitando y ajustando el comportamiento de otros durante unos 300.000 años, lo cual es relativamente fácil de lograr entre parejas similares. Pero cuando el objeto es reemplazado por otros animales con estructuras corporales y métodos cognitivos completamente diferentes, la simple imitación se vuelve difícil; En el caso de las plantas, los hongos, los protistas e incluso las bacterias, los humanos ni siquiera pueden hablar de "aprender" habilidades motoras de ellos. En el campo de la robótica, incluso si podemos hacer que los robots realicen acciones de acuerdo con demostraciones humanas e incluso completen tareas a una velocidad mucho más rápida que los humanos, cómo hacer que robots con estructuras y sistemas completamente diferentes compartan el mismo conjunto de habilidades aprendidas sigue siendo un problema a largo plazo.
En el último artículo publicado en Science Robotics, Stithhpragya Gupta, Aude Billard y otros propusieron que utilizando inteligencia cinemática bajo el marco de "aprendizaje a partir de la demostración (LfD)", robots con formas tan diferentes como R2D2 y un lavavajillas pueden aprender nuevas acciones que se pueden realizar por separado de la misma demostración humana. A diferencia de la práctica anterior de transferir únicamente habilidades entre robots del mismo modelo, este sistema modela matemáticamente las acciones de demostración y las transforma en estrategias universales que pueden adaptarse a diferentes diseños de articulaciones de robots, rangos de movimiento y limitaciones de estabilidad.
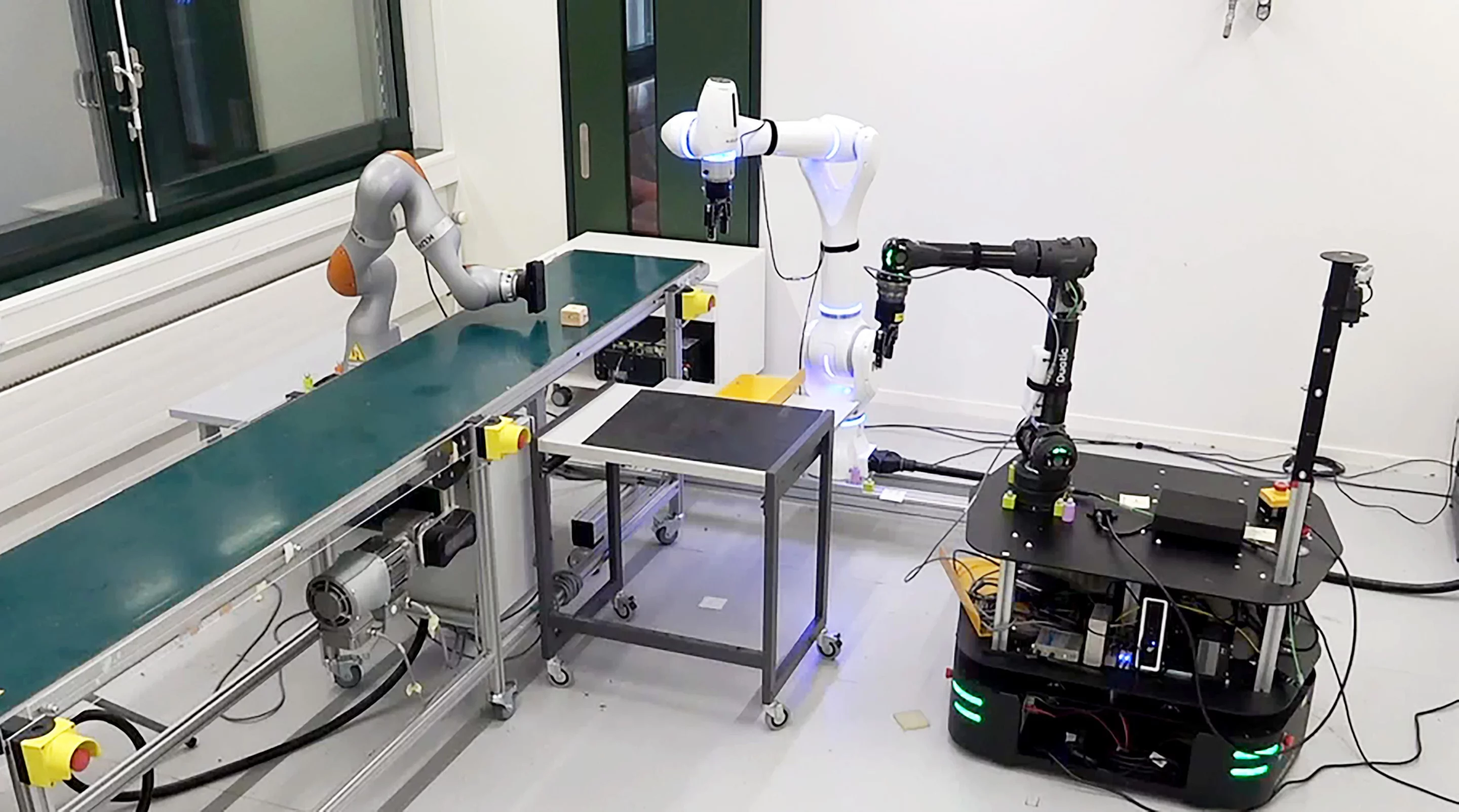
El equipo de investigación utilizó por primera vez la captura de movimiento para registrar una serie de operaciones como colocar, empujar y arrojar objetos en escenarios de montaje industrial. Posteriormente, establecieron un sistema de clasificación para describir las limitaciones físicas del robot, incluidos los límites de equilibrio, el rango de movimiento de las articulaciones, etc., y combinaron esta información con datos de captura de movimiento para formar un modelo de observación y aprendizaje adaptativo que puede ser invocado por diferentes plataformas. En el experimento, tres robots comerciales con formas y mecanismos completamente diferentes pudieron completar de manera estable una serie de operaciones, como empujar bloques de madera desde la cinta transportadora a la estación de trabajo, luego transportarlos a la mesa y finalmente arrojarlos en contenedores designados simplemente observando demostraciones humanas.
核心技术之一是所谓“全局稳定动力系统”(globally stable dynamical system),它使得机器人在学习到的动作空间内可以保证运动过程的可预测性和安全性。 研究人员表示,每一台机器人在执行任务时负责的步骤可以互换调整,系统依然能够正常工作;不同机器人会以符合自身物理条件的方式来理解并重构同一项技能,但始终保持在安全、可行的范围内。 LASA 实验室负责人 Aude Billard 指出,这项工作解决了机器人学领域一个长期存在的挑战:如何在机械结构各异的机器人之间迁移已学会的技能,同时确保行为可预测且安全可靠。
Desde una perspectiva de aplicación, este marco de inteligencia cinemática significa que al agregar o reemplazar robots en líneas de producción industrial o escenarios de servicio, no es necesario reescribir el código de acción para cada nueva pieza de hardware. La inyección de habilidades se puede completar proporcionando un número limitado o incluso una demostración humana. Esto no sólo reduce la dependencia del conocimiento profesional de la programación y la teoría de control, sino que también reduce el umbral para que las pequeñas y medianas empresas utilicen equipos robóticos diversificados. Gupta, coautor del artículo, enfatizó que en el experimento, la forma en que cada robot dividía los pasos de la tarea se podía ajustar en cualquier momento, y todo el sistema aún podía completar con éxito el proceso operativo, lo que mostraba un alto grado de flexibilidad.
El siguiente paso del proyecto es permitir a los operadores humanos generar y ejecutar comportamientos correspondientes a través de descripciones en lenguaje natural sin siquiera tener que realizar acciones de demostración ellos mismos. Durgesh Haribhau Salunkhe, otro coautor del artículo, dijo que el equipo espera eliminar por completo el requisito de conocimientos técnicos: los usuarios sólo necesitan aportar ideas y comportamientos deseados, y el robot hará el resto. Si la investigación relevante continúa avanzando, se espera que este método de aprendizaje de "intercambio intermodal de habilidades" se convierta en la capacidad básica de los futuros sistemas robóticos, acelerando el despliegue de robots en escenarios más reales.