Cuando los ingenieros de la Escuela Politécnica Federal de Lausana (EPFL) en Suiza repensaron el concepto de "mano", abandonaron deliberadamente una de las configuraciones más fundamentales: la mano debe estar fijada en el brazo. Desarrollaron una mano robótica que puede separarse del brazo robótico, arrastrarse por la superficie como una pequeña criatura y acercarse y agarrar objetos desde casi cualquier dirección, proporcionando una nueva herramienta operativa para futuras tareas de inspección y mantenimiento industrial.
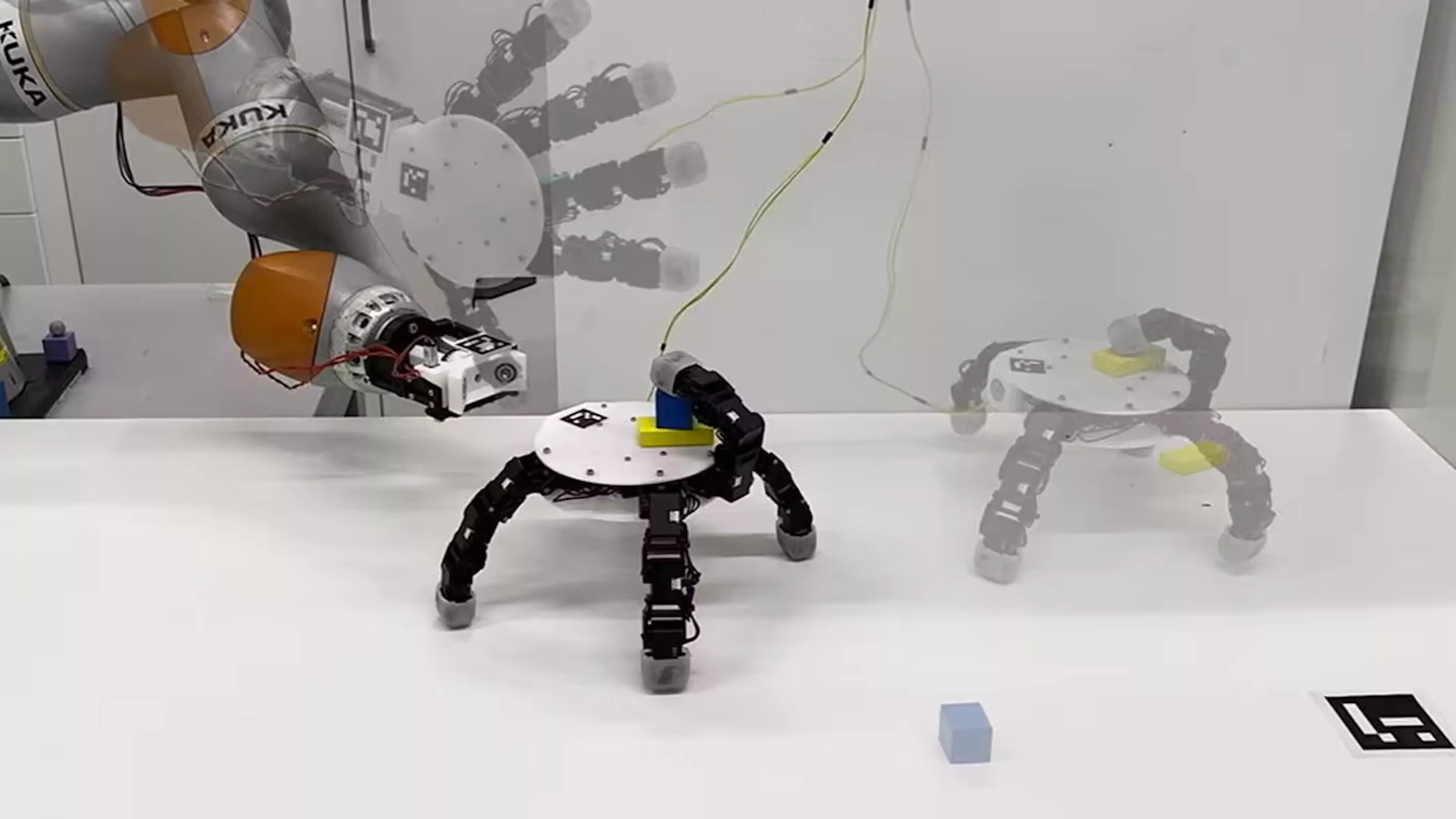
A diferencia de los manipuladores tradicionales, que están fijados al extremo de un brazo robótico, este nuevo dispositivo es un manipulador de "modo dual": puede usarse como un efector final normal o puede moverse de forma independiente después de desbloquearse del brazo robótico. Una vez desprendido, depende de movimientos coordinados entre sus dedos para gatear, girar y reposicionarse en diferentes direcciones para acercarse activamente al objeto objetivo. Este diseño desdibuja hasta cierto punto los límites entre "miembros" y "máquinas móviles", y el equipo de investigación lo considera una evolución pragmática de la forma del robot, más que un concepto de ciencia ficción.
El proyecto está dirigido por Gao Xiao, quien realizó una investigación en la EPFL y ahora se encuentra en la Universidad de Wuhan. Le dijo al Financial Times que el objetivo del equipo es ampliar los límites de lo que las "manos", ya sean biológicas o mecánicas, pueden hacer en tareas operativas. A diferencia de las manos humanas, que dependen de un solo pulgar para oponerse a los dedos restantes, cada dedo de esta mano robótica puede formar una relación de oposición con cualquier otro dedo. Esta estructura de contradedo le da al sistema mucha más flexibilidad que la mano humana, permitiéndole cambiar entre diferentes combinaciones de dedos para manipular objetivos con precisión de diversas maneras, como pellizcar, sujetar o levantar.
En términos de innovación estructural, esta mano también tiene la capacidad de "agarrar en ambas direcciones, adelante y atrás" que las manos humanas no tienen. Los dedos humanos son fisiológicamente incapaces de agarrar objetos de manera efectiva desde la dirección dorsal de la palma, pero este sistema puede sostener objetos de manera estable tanto en la dirección delantera como trasera. Esto no sólo le permite agarrar múltiples objetos al mismo tiempo, sino que también abre espacio para "realizar múltiples tareas con la misma mano" al manipular herramientas y objetivos.
En la demostración experimental, esta mano robótica completó una serie de tareas operativas que normalmente requieren la cooperación de dos manos humanas, como desenroscar la tapa de la botella mientras se fija el cuerpo de la botella o aplicar torsión con otra herramienta mientras se estabiliza la pieza de trabajo. Al programar de manera flexible las combinaciones opuestas de diferentes dedos, puede simular o incluso superar algunos modos operativos en escenarios tradicionales de colaboración a dos manos.
Gao Xiao enfatizó que el punto de partida del diseño del equipo era el "control funcional" en lugar de fines de sigilo o vigilancia. Los investigadores creen que sus escenarios de aplicación más potenciales se encuentran en la primera línea de la industria: inspección del estado dentro de tuberías o equipos, desmontaje y montaje de piezas de mantenimiento o recuperación de piezas de trabajo caídas en espacios estrechos. En estas aplicaciones, los brazos robóticos tradicionales o los operadores humanos a menudo no pueden penetrar el sitio, mientras que las "manos que se arrastran" pequeñas y móviles de forma independiente pueden acceder y operar lugares de difícil acceso.
El equipo de investigación prevé que los futuros sistemas robóticos podrían combinar plataformas móviles con manos robóticas desmontables. La plataforma móvil es responsable de inspeccionar y acceder a equipos en sitios complejos, mientras que la mano del robot se separa de la plataforma o del brazo robótico cuando es necesario y se adentra en espacios estrechos para completar tareas como limpiar escombros, operar válvulas o agarrar equipos. Se espera que esta estructura de división del trabajo y colaboración mejore la adaptabilidad y la tasa de finalización de tareas de los sistemas de automatización industrial en entornos complejos.
Este trabajo también ha llamado la atención de la comunidad de la robótica. Digby Chappell, profesor asociado del Instituto de Robótica de la Universidad de Oxford, comentó que esta mano robótica es "interesante y provocativa" y tiene una importancia esclarecedora en campos como la automatización industrial y la investigación de prótesis. Señaló que aunque la velocidad de avance del prototipo no es muy rápida en la actualidad, su capacidad para lograr sinergia entre "movimiento y agarre" ya está redefiniendo la posible forma de "manos robóticas".
Actualmente, esta "mano que se arrastra" todavía se encuentra en la etapa de prototipo de laboratorio. Sin embargo, ha mostrado claramente un camino completamente diferente al de imitar la anatomía humana: el siguiente paso de la robótica puede que ya no se limite a "parecer a los humanos", sino que evolucionará en una dirección más adaptable, polivalente y modular en torno a las necesidades industriales y prácticas.