Desde hace un tiempo se viene oyendo hablar de dispositivos "biestables", que pueden mantener dos estados sin consumir energía. Un dispositivo biestable es un dispositivo tensor que es capaz de cambiar entre dos estados estables, pero no requiere electricidad para permanecer en ninguno de los dos estados. Un nuevo dispositivo inspirado en las vainas de semillas de plantas toma la forma de una pinza robótica que es resistente y fácil de activar.
Las horquillas de metal son buenos ejemplos de objetos cotidianos que pueden agarrar objetos mediante el contacto. Para estos elementos, normalmente no queremos aplicar mucha presión para activar la acción de agarre; esto significa querer que el agarrador tenga una "barrera de energía" baja.
El problema es que los dispositivos biestables con barreras de baja energía a menudo no tienen suficiente potencia para agarrar los objetos que agarran. En otras palabras, es probable que pierdan el control de objetos pesados o de objetos arrastrados por fuerzas externas.
Lo que necesitamos es un agarrador que tenga una barrera de energía baja cuando inicialmente agarra un objeto, pero una barrera de energía mayor una vez que se agarra el objeto. Cuando llega el momento de soltar el objeto, la barrera energética vuelve a bajar.
Teniendo en cuenta este requisito, un equipo de científicos chinos estudió las vainas biestables de las impaciencias.

Mientras las semillas de la vaina estén inmaduras y no puedan dispersarse, la vaina mantiene una barrera de alta energía, lo que dificulta su activación. Sin embargo, una vez que las semillas maduran, esta barrera energética se debilita. Por lo tanto, incluso la presión de las gotas de lluvia es suficiente para que las vainas expulsen sus semillas al suelo circundante.
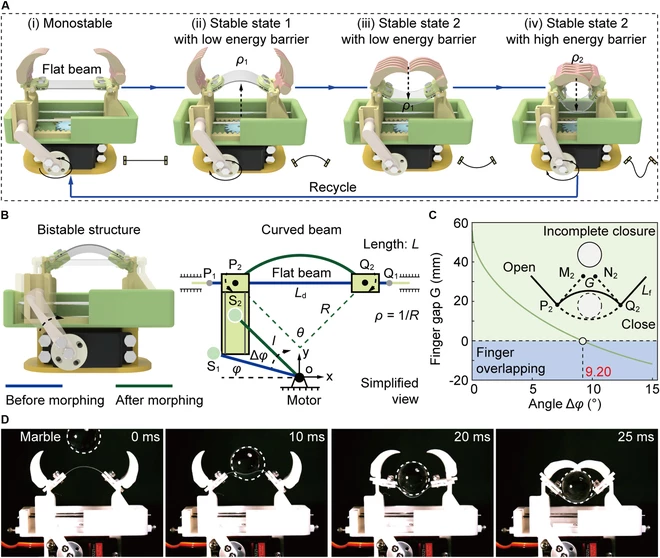
Diagrama esquemático de la pinza biónica biestable.
Dr. Yang Jinzhao de la Universidad Sun Yat-sen en China, Dr. Wu Jianing de la Universidad Sun Yat-sen y Dr. Peng Haijun de la Universidad Tecnológica de Dalian
La pinza, inspirada en las vainas de impatiens, consta de dos "dedos" de agarre cuyas bases están conectadas a cada extremo de una viga elástica. Las dos abrazaderas que conectan los dedos a la viga están conectadas cada una a un eje giratorio accionado por un motor.
En el estado neutral predeterminado del soporte, la viga es plana y libre de tensión. Sin embargo, cuando es necesario agarrar un objeto, el eje gira, lo que hace que la viga se doble ligeramente hacia arriba. Esto lo coloca en un estado biestable bajo tensión con una barrera de baja energía.
Entonces, cuando la pinza se coloca alrededor de un objeto, y ese objeto presiona contra una viga que se curva hacia arriba, hace que la viga salte en una dirección que se curva hacia abajo, mientras simultáneamente tira del dedo hacia el objeto.
Una vez que esto sucede, el eje gira en la dirección opuesta, lo que hace que la viga se doble aún más hacia abajo. Esto aumenta su barrera energética, lo que fortalece y asegura el agarre del sujeto sobre el artículo.
En una demostración de la tecnología, una de las pinzas se montó encima de un dron cuadricóptero, lo que permitió que el dron colgara de ramas de árboles, barandillas y otros objetos sin flotar en su lugar. Si bien el motor del haz consume algo de energía al ajustar la tensión del haz, no se requiere energía para mantener el objeto sujeto. Esto no sucede con las pinzas tradicionales.

Drones utilizados en la investigación
"Nuestra pinza robótica tiene una velocidad de respuesta rápida, una fuerza de interacción programable y un diseño simple y eficiente, lo que abre nuevas vías para los sistemas robóticos de próxima generación", afirmó el Dr. Jianing Wu de la Universidad Sun Yat-sen. El Dr. Wu codirigió el proyecto con el Dr. Peng Haijun de la Universidad Tecnológica de Dalian. "Este mecanismo único puede ampliar significativamente las capacidades del robot, permitiendo su uso en una variedad de campos".
Recientemente se publicó un artículo sobre la investigación en la revista Research.